|
| |
|
|
[an error occurred while processing this directive] | [an error occurred while processing this directive] |
|

| Magazin-Home | Neue Beiträge | Die Besten | Die Hits | Irgendeinen Beitrag | Suchen | Favoriten | Bewertung und Kommentar |
Baubericht des Robbe-Gabelstaplers Linde H50 |
 Nach dem mein Händler mich, nach langen Lieferschwierigkeiten, angerufen hatte, konnte ich den Gabelstapler endlich abholen.
Der Bausatz: Nun noch ein Blick auf die Liste und aufgeschrieben, was zum Bauen an Zubehör benötigt wird. Richtet euch nicht nach dem Cargo-Prospekt. Denn die Angaben über das Lenkservo sind falsch. Kein FS 500 Micro, sondern ein Servo in Standartgröße (z. B. 3003 ) wird gebraucht. Als Fahrakku wird F1319 (5 KR 1400 AE ) nicht 4418 eingesetzt. Die Zelle des verwendeten Akkus ist größer als eine Mignonzelle. Der Akku läßt sich nach dem Einbau leider nicht mehr auswechseln, es sei denn man zerlegt den Gabelstapler wieder in zwei Hälften. Dies könnte auf größeren Veranstaltungen, auf denen man gerne länger fahren würde, zu Problemen führen. Aber kommen wir endlich zum Baubericht. Als erstes den Karton noch beim Händler öffnen und die Montage- und Bedienungsanleitung in die Hand nehmen. Es ist ein Korrekturblatt und eine Zubehörliste ( ohne Lenkservo? ) dabei. Leider fehlt die erwähnte Ersatzteilliste, was in der Zukunft vielleicht hilfreich wäre. |
|
 Die Baustufen gehen bis Nummer 28 und die Bauteile sind den
Baustufen nach verpackt. Die Baustufen gehen bis Nummer 28 und die Bauteile sind den
Baustufen nach verpackt.Auf geht’s zu 1. Baustufe ( BS ). Jetzt kommt keine Aufzählung der Montageliste sondern nur Dinge, die mir aufgefallen sind. Bevor man jedoch anfängt ausgiebig zu basteln,sollte man den Akku schon einmal aufladen, den dieser wird später noch zur Einstellung des Lenk- und des Kippservo benötigt. In der 1. BS geht um das Kugellager 5x16x5, in der nächsten Baustufe um ein Kugellager 6x16x5. Beide sind in einem Beutel. Bleiben wir gleich bei dieser zweiten BS. Es steht: Kugellager ins Chassis drücken. Es gibt dafür eine Montagehilfe, diese drückt aber nicht auf den Außenkranz des Lagers, was in BS 5 zu Problemen führt, was ich später noch näher erläutere. Um ein zerlegen in BS7 zu vermeiden, sollte man den vorderen Servohalter (Bauteil 4.1) in BS 4 so drehen, dass die Löcher mehr zum vorderen Fahrzeugteil hin platziert sind.
Bild rechts: Alles fein säuberlich verpackt. Steckachsen rein Sche... eine paßt immer noch nicht. Also, Achsen tauschen, eine Seite läßt sich nicht weit genug durchstecken. Um dieses Problem zu beheben, muß man die Kanten der beiden abgeflachten Stellen für das Zahnrad brechen. Ursache ist also das Kegelrad im Differenzial.
Bild rechts: Baustufen in einzelne Tüten verpackt, unten rechts in der Ecke ist das benötigte Zubehör. Bei der 7. BS, Montage des Lenkservos, paßt der Halter zum einschrauben nicht , er ist zu eng. Deshalb habe ich diesen, wie in BS 4 beschrieben, gedreht. Dies hieß für mich, Lenkachse und Steckachsen wieder raus, Gehäusehälften auseinander ziehen, Halter drehen und alles wieder zusammen bauen.
Bild links: Hier müssen nun die Antriebshalbachsen eingebaut werden. Bei dem nun folgenden Lenkservoeinbau sollte man tunlichst darauf achten, wie in der Anleitung geschrieben, das Lenkservo mit Hilfe der Fernsteuerung in Neutralstellung zu bringen. Andernfalls steht hinterher die Lenkung schief, was nur durch abermaliges Zerlegen des Gabelstaplers zu beheben ist, da das Lenkservo in montiertem Zustand nicht zugänglich ist.
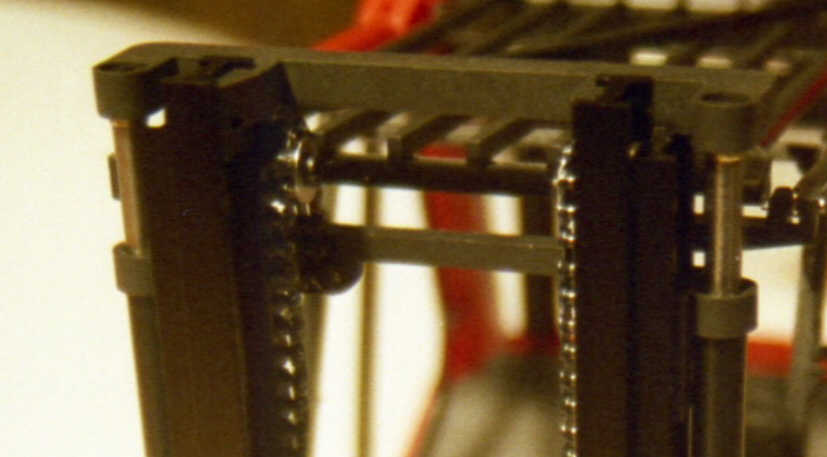
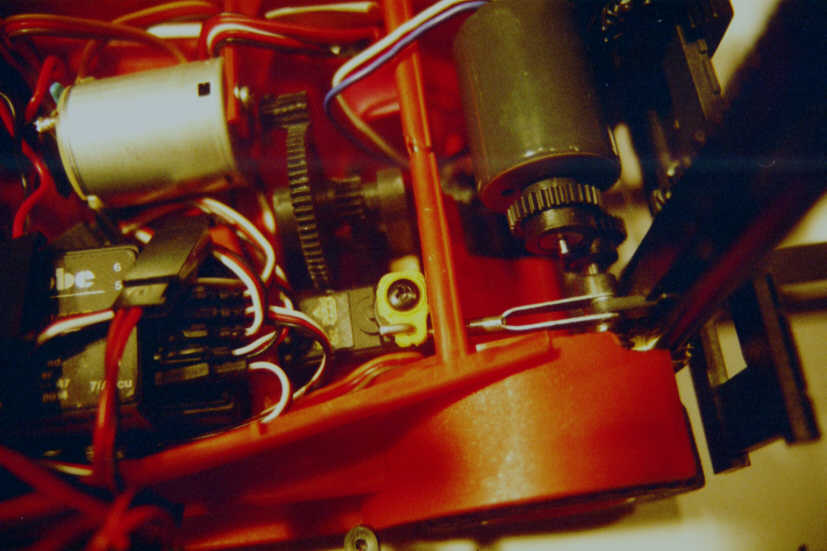
In der 8. BS bei der Montage der Ketten währe 1/10 mehr Platz sehr hilfreich. An einem Ende sollte man die Alurohre (8.9) anfeilen. Sie lassen sich dadurch leichter eindrücken. Wer das mit dem Hammer macht, haut sie sehr leicht zu weit rein, was später bei der Führung des Schneckentriebs zu Problemen führt. Wenn man in die Alurohre einen Schraubendreher einführt, kann man über den Griff des Schraubendrehers den benötigten Druck ausüben, um die Rohre in die Mastverbindung zu drücken. Bild rechts: Differenzial mit eingedrücktem Kugellager. Warum in BS 9 das 30 Zahnrad auf den Motor kommt und nicht das mit 28z wird die Praxis ergeben. Der Motor ist ganzflächig mit einem grauen Dekorstreifen zu umkleben. Da dabei auch die zwei Kühlschlitze zugeklebt werden, habe ich diese in den Dekorbogen eingeschnitten, um eine bessere Kühlung zu gewährleisten. Robbe schreibt davon nichts in der Anleitung, aber besser ist besser und der Motor wird’s einem vielleicht mit einer längeren Lebensdauer danken.
Bild: Der gedrehte Servohalter. Dies ist trotz Verwendung der Montagehilfe in BS 10 zu überprüfen! Der Gabelträger
wird in der BS11 mit den Ketten verbunden. Da hierfür Schrauben M1 verwendet werden,
sollte sich der Bauer vergewissern, ob er einen entsprechend kleinen Schraubendreher zur
Verfügung hat. Zur Montage der Laufrollen werden 4 Zylinderstifte in der Gabelträger gesteckt. Diese sollten zur Mitte hin bündig abschließen, um nach außen genügend Überstand als Achse für die Laufrollen zu Verfügung zu haben. Die Kettenrollen, welche in Baustufe 12 montiert werden, haben laut Robbe bei der ersten Serie einen zu großen Durchmesser. Bild: Getriebe und Differenzial. Wenn man die Möglichkeit hat, sollte man diese um 0,5mm im Durchmesser verkleinern. Ändert man dies nicht, so wird sich der Gabelträger beim Hochfahren mit den Rollen verklemmen. Dies hat zwei Nebeneffekte. Zuerst einmal geht der Gabelträger in leerem Zustand nicht von allein wieder runter, zum Anderen neigt der Motor beim Verklemmen zum Blockieren. Um all dies zu verhindern, ist es ratsam, die Rollen entsprechend abzudrehen.
Bild rechts: Hier ist die Naht zwischen den beiden Gehäusehälften zu sehen. Nun ging es einige Baustufen problemlos weiter, bis ich bei BS 15 auf ein "optisches" Problem gestossen bin. Die verwendeten Felgeneinsätze gefielen mir überhaupt nicht, so dass ich diese durch eine Vielzahl von M1,6 Schrauben ersetzt habe. Der Bau der Kabine bereitete keinerlei Probleme, wodurch ich recht zügig zur Montage
des Baumes ans Fahrzeug kam.
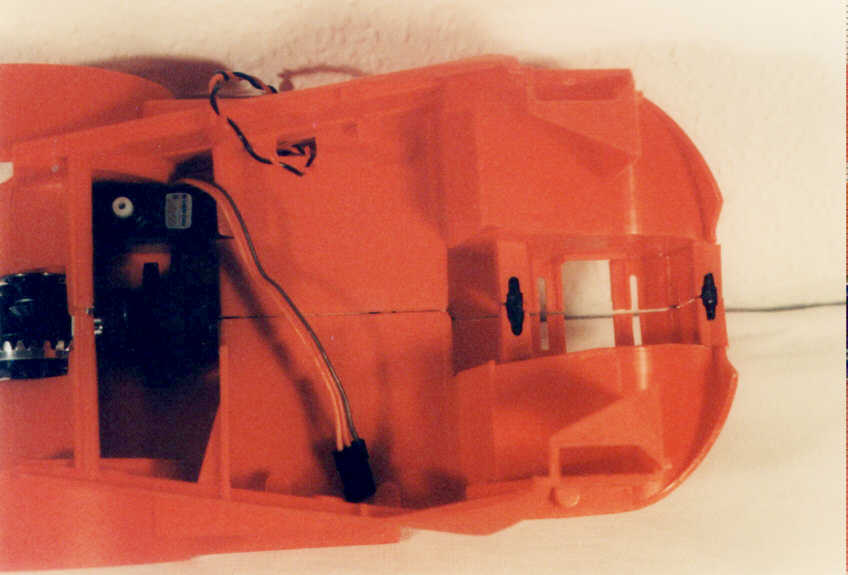
Bild: Der vorgesehene Platz für das Lenkservo. Da sich meine Fernsteuerung, eine robbe-Futaba F14, problemlos mit dem Umpolschalter und dem Fahrtregler verstand, konnte der Gabelstapler recht zügig in Probebetrieb genommen werden. Die anschließende Montage des Gegengewichts und der Kabine erfolgte ebenfalls problemlos, sodaß es zum Schluß ans Aufkleben des Dekors ging.
Bild rechts: Die montierte Lenkachse. Die vier wichtigsten Schrauben für den Zusammenbau sind unter zwei Aufkleber versteckt. Mit diesen Schrauben kommt man an das Innere des Gabelstaplers, wie z.B. Servos oder Kabel. Muß der Stapler noch einmal (z.B. für eine Reparatur) geöffnet werden, muß man die Aufkleber zerstören. Eine andere Möglichkeit wäre, die Schrauben durch den Aufkleber und somit durch den Linde-Schriftzug zu schrauben. Das wäre praktisch, aber bestimmt nicht schön.
Beim Einbau der Empfängeranlage mußte ich andere Wege gehen, als in der Anleitung
beschrieben, da ich eine Robbe-Promas Fernsteueranlage besitze und diese mit dem Robbe
rokraft 50µP-Fahrtregler nicht funktioniert. Der Grund ist, das die Promas die
Nullstellung der Servos mit 1,3 ms ansteuert. Die neuen Anlagen arbeiten jedoch mit 1,5ms,
dadurch habe ich keine Neutralstellung bei dem rokraft 50µP-Fahrtenregler. Der
Fahrtenregler von Conrad hat mir durch Rauchzeichen die zusammen Arbeit aufgekündigt. Ich
muß aber zugeben, dass ich kein Kühlblech montiert hatte. Weil mir die Wärmeleitpaste
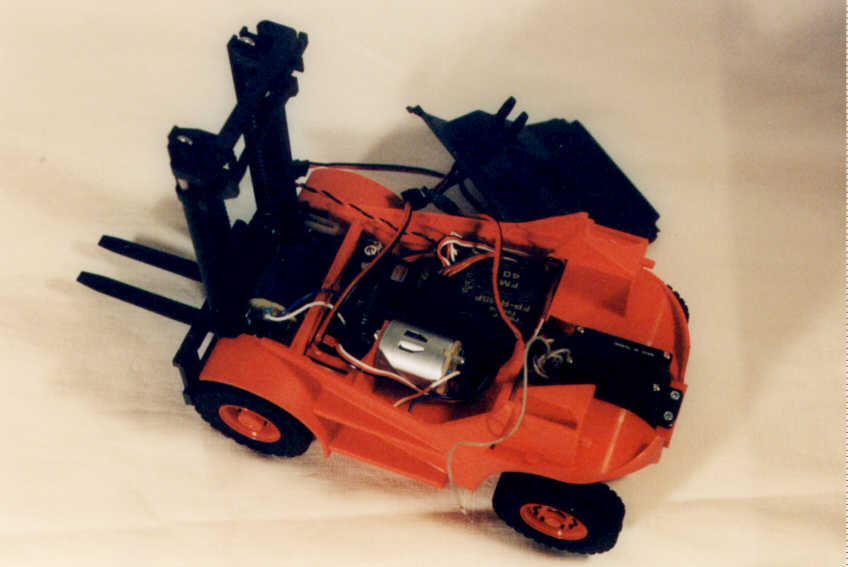
fehlte. Bild links: Der Baum. Bild rechts: Motor zum Heben/Senken, mit Umpolschalter. Jetzt hat diese Arbeit der Graupner Mini-Speed 4 übernommen. Der Umpolschalter funktioniert nur bei vollen Ausschlag der Trimmung. Nachdem mein Mast von Robbe retour kam, konnte der Bau weiter gehen. Der Mast hebt jetzt die 1250 Gramm. Fehler waren, wie weiter oben beschrieben, eine krumme Stieftachse und das Mastprofil war nicht parallel. Im Grossen und Ganzen ist Robbe hier ein hervorragendes Modell mit sicherlich hohem Spielwert gelungen. Sollte sich der Bericht zu negativ anhören, liegt dies mit Sicherheit daran, das ich hier nur geschrieben habe, was mir besonders aufgefallen ist. Sei es, weil ich es anders gemacht habe, als in der Anleitung steht, oder ich dem nicht ganz versiertem Modellbauer Probleme beim Bauen ersparen wollte. Ich denke, dass dieses Modell in unserem Fuhrpark mit Sicherheit eine Bereicherung darstellt und vom meinem Sohn ausgiebig genutzt werden wird.
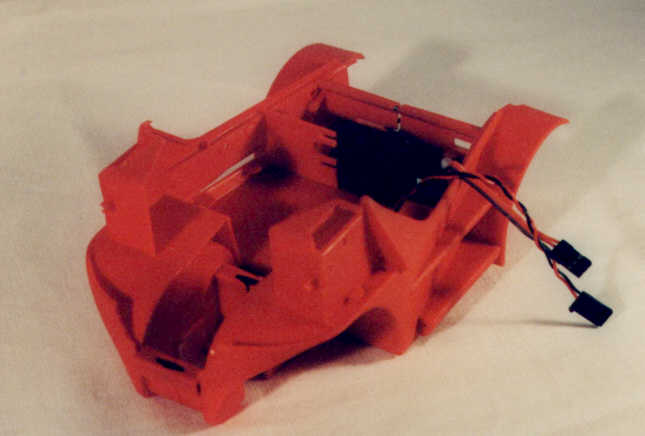
Bild rechts: Chassis mit montiertem Mast. Noch ein paar Zeilen zum Zubehör Transport. Die Lösung zum Stapeln der Gitterbox finde ich nicht glücklich. Sie entspricht nicht
dem Vorbild. Die Gitterbox hat am Fuß eine Nase, die oben im Rahmen der unteren Box
eingreift. Auf diesen Nasen steht die Gitterbox. Leider sind nur zwei Paletten im Set.
Wenn man die Paletten von der schmalen Seite betrachtet sind sie gerade, von der langen
Seite leider krumm. Stell ich die beiden Holzkisten auf die Paletten, so kann ich die
Fässer nur in die Holzkisten oder in die Gitterbox laden, da eine weitere Palette fehlt.
Man könnte unter den Bild rechts: Schnecke mit Schneckenrad. Die Fässer als Ladegut sind bestimmt eine eigene Palette wert, leider fehlt jedoch ein sechstes Faß, um die Palette voll zu machen.
Links die modifizierte Felge, rechts das Original.
|
Bild links: Dies sind die genannten Umlenkrollen für die Kette. / Bild rechts: Servo mit Gestänge für die Baumneigung.
Die Kabine.
Das Modell fast fertig zur Probefahrt. / Das Modell ist fertig. / Hier die Rückansicht, Antenne ist nicht von Robbe.
Einbauort des Fahrtenreglers von Conrad./ Das Foto zeigt das Werkzeug aus dem Baukasten.
Dies sind die beim Bau des
Gabelstaplers übrig gebliebenen Bauteile.
Na, dann mal an die Arbeit. .... und hoch damit..... / Ladegut von Robbe / Holzkiste mit zusätzlichen Holzklötzchen.
-------
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
|
|||||
Kommentare oder Rückfragen zu diesem Beitrag richten Sie bitte unter Angabe der gesamten URL an: |
Please send comments or questions on this issue with the complete URL to: |
| redaktion@rconline.net |
|









 Als es in der 5. BS darum geht, die Antriebshalbachsen ins
Differenzial einzusetzen, waren diese zu kurz. Die Ursache ist, das ich das äußere
Kugellager in BS2 plan ins Chassis eingesetzt habe. Der Kugel- lagersitz ist 6mm tief,
das Lager ist aber nur 5mm breit. Mit der Montagehilfe war das Lager nicht
dazu bereit tiefer zu gehen. Hammer und 16mm Rohr wo bist du? Hammer ja, Rohr nein, was
nun?Mit einer Stecknuß aus dem Steckschlüsselkasten geht es auch.
Als es in der 5. BS darum geht, die Antriebshalbachsen ins
Differenzial einzusetzen, waren diese zu kurz. Die Ursache ist, das ich das äußere
Kugellager in BS2 plan ins Chassis eingesetzt habe. Der Kugel- lagersitz ist 6mm tief,
das Lager ist aber nur 5mm breit. Mit der Montagehilfe war das Lager nicht
dazu bereit tiefer zu gehen. Hammer und 16mm Rohr wo bist du? Hammer ja, Rohr nein, was
nun?Mit einer Stecknuß aus dem Steckschlüsselkasten geht es auch. Das Differenzial ist ein guter alter Bekannter aus dem Panther, aber
die Zahnräder sind schon eingesetzt. Wer die Ehre hatte, die mal einzusetzen, weiß was
er verpaßt hat. Bei der Motormontage sind nicht die Schrauben 2,2x6,5, sondern 2,5x6,5
einzusetzen. Dies ist Robbe bekannt und diese liegen zusätzlich bei.
Das Differenzial ist ein guter alter Bekannter aus dem Panther, aber
die Zahnräder sind schon eingesetzt. Wer die Ehre hatte, die mal einzusetzen, weiß was
er verpaßt hat. Bei der Motormontage sind nicht die Schrauben 2,2x6,5, sondern 2,5x6,5
einzusetzen. Dies ist Robbe bekannt und diese liegen zusätzlich bei.
 Das Lenkservo sollte man mit Gefühl festschrauben, da die
Schrauben in Kunststoff eingedreht werden und wie jeder weiß, kommt nach fest ab.
Das Lenkservo sollte man mit Gefühl festschrauben, da die
Schrauben in Kunststoff eingedreht werden und wie jeder weiß, kommt nach fest ab. Achtet
darauf, dass die Querwelle Hubmast (im Bild oben zu sehen) auch gerade ist. Meiner war es
nicht, hat Robbe festgestellt. Dies hatte zur Folge, dass der Spindelantrieb zu
schwergängig war. Denn mein Mast war so schwergängig, dass ich ihn nach Robbe
eingeschickt habe. Die Schneckenräder sollen genau in der Mitte der Schnecke sein.
Achtet
darauf, dass die Querwelle Hubmast (im Bild oben zu sehen) auch gerade ist. Meiner war es
nicht, hat Robbe festgestellt. Dies hatte zur Folge, dass der Spindelantrieb zu
schwergängig war. Denn mein Mast war so schwergängig, dass ich ihn nach Robbe
eingeschickt habe. Die Schneckenräder sollen genau in der Mitte der Schnecke sein.
 Hierbei fiel mir negativ auf, dass die einzelnen Dekore noch
auszuschneiden sind. Diese sind selbst bei den kleinsten LEGO-Baukästen schon
vorgeschnitten. Vielleicht ändert Robbe dies ja auch noch bis zur Auslieferung der
zweiten Serie? Wäre jedenfalls schön, denn exaktes Schneiden, gerade bei Rundungen und
Kreisen ist nicht Jedermanns Sache.
Hierbei fiel mir negativ auf, dass die einzelnen Dekore noch
auszuschneiden sind. Diese sind selbst bei den kleinsten LEGO-Baukästen schon
vorgeschnitten. Vielleicht ändert Robbe dies ja auch noch bis zur Auslieferung der
zweiten Serie? Wäre jedenfalls schön, denn exaktes Schneiden, gerade bei Rundungen und
Kreisen ist nicht Jedermanns Sache. Da
Robbe den Zugehörsatz StVO noch nicht ausgeliefert hat, ist es also ganz sicher, dass ich
an diese Schrauben muß und somit die Aufkleber noch einmal entfernen muß.
Da
Robbe den Zugehörsatz StVO noch nicht ausgeliefert hat, ist es also ganz sicher, dass ich
an diese Schrauben muß und somit die Aufkleber noch einmal entfernen muß.
 Dieser
Meinung schließe ich mich voll an. Bis auf die Zeile mit dem Sohn, weil ich selber
spielen werde.
Dieser
Meinung schließe ich mich voll an. Bis auf die Zeile mit dem Sohn, weil ich selber
spielen werde. Holzkisten auch kleine Holzklötzchen leimen. Dann hätte man
beide Paletten frei.
Holzkisten auch kleine Holzklötzchen leimen. Dann hätte man
beide Paletten frei.